Carrier Sense Multiple Access (CSMA) and CSMA/CD
Learn about CSMA protocols, collision detection, and how devices share communication channels in computer networks
Carrier Sense Multiple Access (CSMA) and CSMA/CD
Carrier Sense Multiple Access (CSMA) and its variants are methods used in computer networks to manage how devices share a communication channel. These protocols are essential for ensuring efficient data transmission in shared network environments.
What is Carrier Sense Multiple Access (CSMA)?
CSMA is a protocol in which devices on a network check (or "sense") whether the communication channel is busy before transmitting data. This method was developed to decrease the chances of collisions when two or more stations attempt to send signals over the data link layer simultaneously.
The basic principle of CSMA is simple: each station must first check the state of the medium before sending data. If the channel is busy, the station waits; if it's idle, the station can transmit.
Vulnerable Time in CSMA
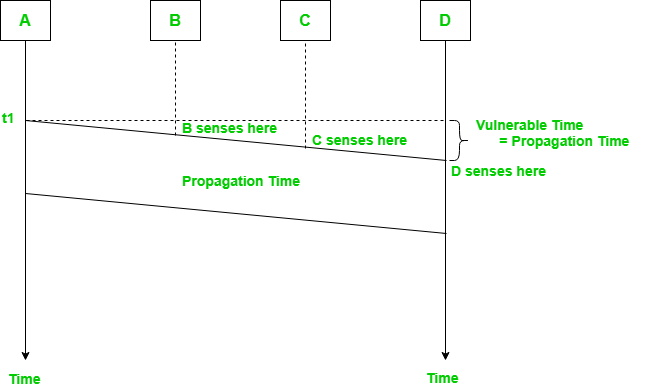
Vulnerable time is the period during which collisions might occur in a CSMA network. It's the short interval when there's a possibility that two devices might send data simultaneously, causing their transmissions to interfere with each other.
In CSMA networks, after a device checks and finds the network free, there's a small delay before it starts sending data. During this time, another device might also check the network, find it free, and begin transmitting, leading to a collision. This period is called the vulnerable time.
The vulnerable time in CSMA equals the propagation time (Tp), which is the time it takes for a signal to travel from one end of the network to the other.
Types of CSMA Protocols
There are four main types of CSMA protocols, each with different approaches to handling channel access:
-
1-Persistent CSMA: In this aggressive approach, a station continuously monitors the channel and transmits immediately when it becomes idle. If a collision occurs, the station waits a random amount of time before trying again.
-
Non-Persistent CSMA: When a station finds the channel busy, it waits for a random period before checking again, rather than continuously monitoring. This reduces the likelihood of collisions but may increase delay.
-
P-Persistent CSMA: This combines elements of 1-Persistent and Non-Persistent approaches. When the channel is idle, a station transmits with probability P or defers with probability (1-P). If it defers, it waits for a time slot and then checks again.
-
O-Persistent CSMA: In this method, a supervisory node assigns a transmission order to each station. Stations wait for their designated time slot to transmit when the medium is idle.
CSMA with Collision Detection (CSMA/CD)
CSMA/CD extends the basic CSMA protocol by adding the ability to detect collisions during transmission. This was widely used in early Ethernet networks with shared bus topology, though it's less common in modern switched Ethernet environments.
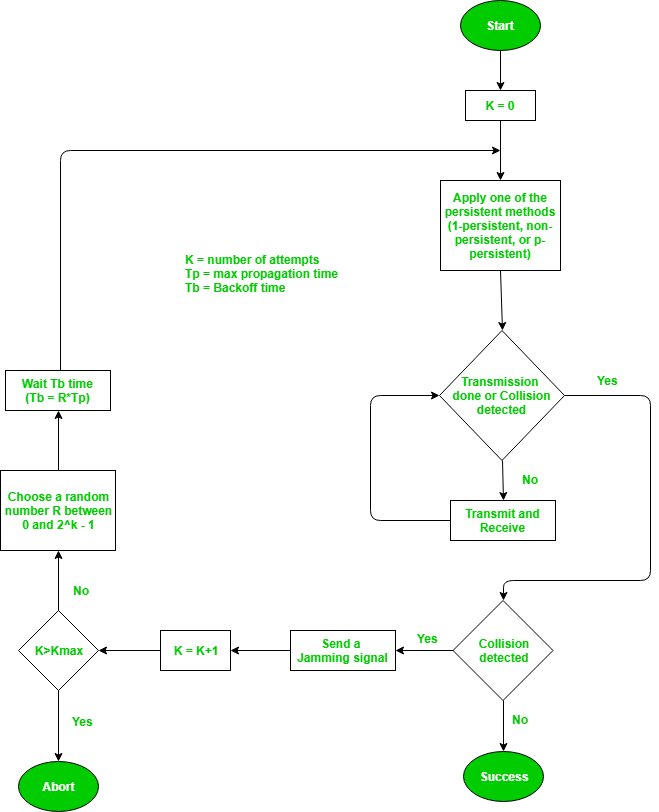
How CSMA/CD Works
- A station wanting to transmit first listens to the channel to determine if it's idle.
- If the channel is idle, the station begins transmitting while continuing to monitor the channel.
- If a collision is detected during transmission, the station immediately stops transmitting and sends a jam signal to notify all stations of the collision.
- After sending the jam signal, the station waits for a random backoff time before attempting to transmit again.
- The process repeats until the transmission is successful or a maximum number of attempts is reached.
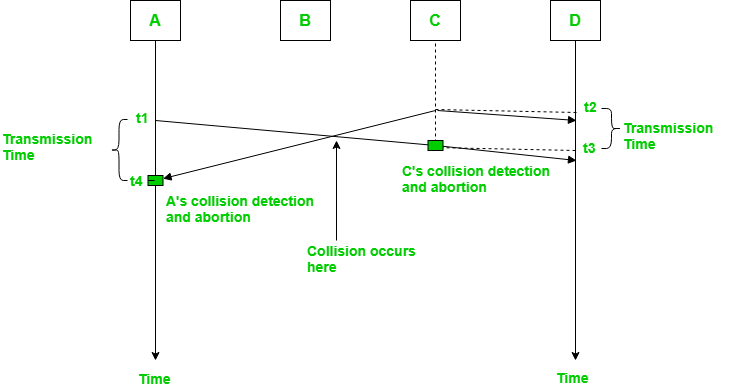
Collision Detection in CSMA/CD
For collision detection to work effectively, the transmission time of a frame must be at least twice the maximum propagation time across the network. This ensures that a station can detect any collision before it finishes transmitting.
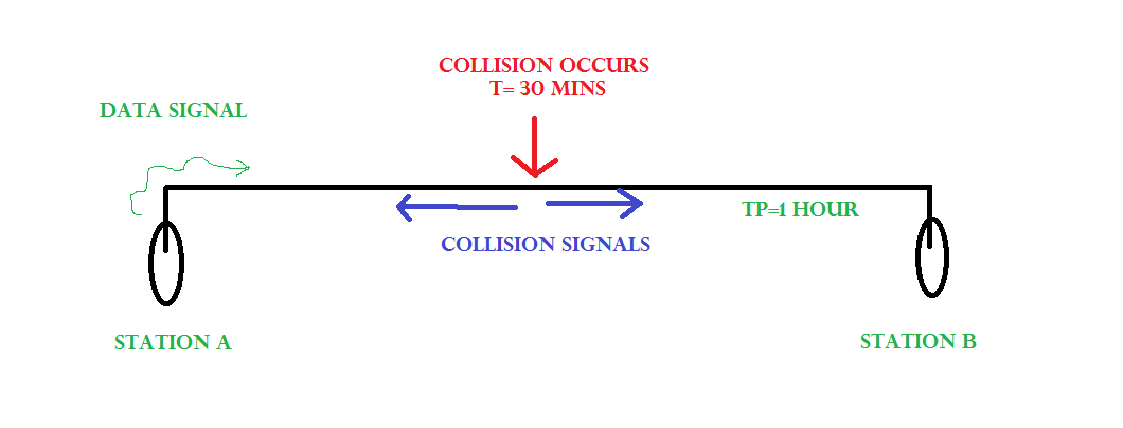
In the example above, two stations (A and B) are separated by a propagation time of 1 hour. If A begins transmitting at t=0 and a collision occurs at t=30 minutes, both stations will receive the collision signal at t=1 hour.
For a more precise understanding, consider the worst-case scenario:
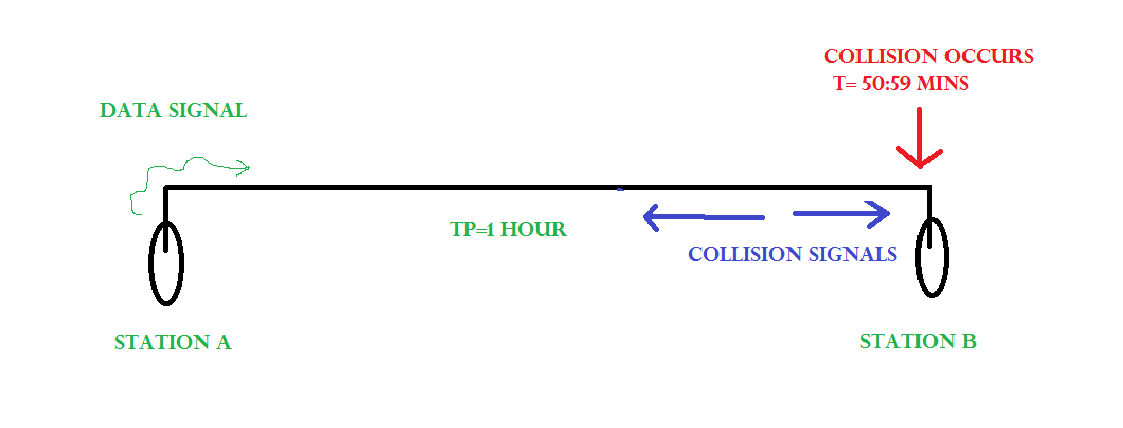
If a collision occurs just before the signal reaches the destination (at t=59:59), it will take another 59:59 for the collision signal to reach the sender. This means the total time to detect a collision could be up to 2 * Tp (twice the propagation time).
Therefore, for reliable collision detection:
- Transmission Time (Tt) ≥ 2 * Propagation Time (Tp)
- Minimum Frame Length ≥ 2 * Tp * Bandwidth of the link
If a frame is too short to satisfy this condition, padding is added to ensure it meets the minimum length requirement.
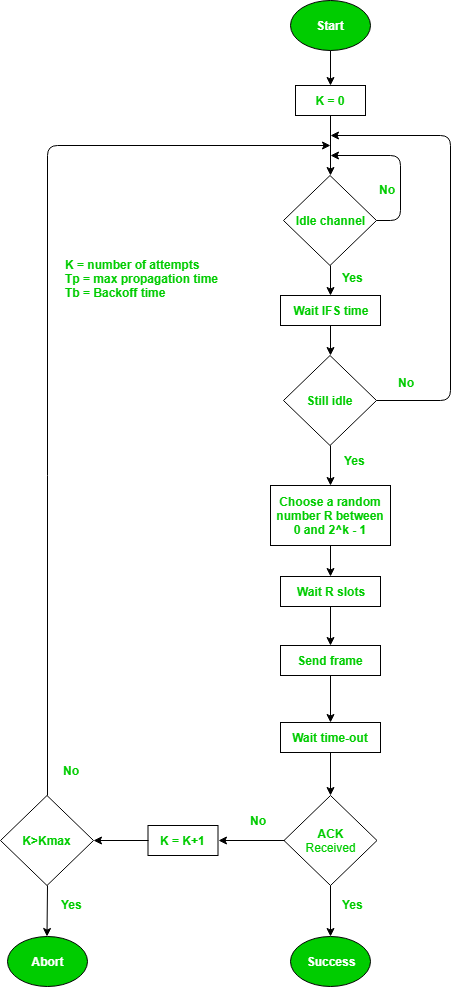
CSMA with Collision Avoidance (CSMA/CA)
CSMA/CA is designed for wireless networks where collision detection is difficult due to the nature of radio transmission. Instead of detecting collisions, it tries to avoid them altogether.
Key Strategies in CSMA/CA
-
InterFrame Space (IFS): When a station finds the channel busy, it waits for an additional period called IFS after the channel becomes idle. The length of the IFS can be used to assign priorities to different types of traffic.
-
Contention Window: This is a time period divided into slots. A station ready to transmit chooses a random number of slots as its wait time before attempting transmission.
-
Acknowledgments: Positive acknowledgments and timeout timers help ensure successful frame transmission.
-
RTS/CTS Mechanism: In some implementations, a Request-To-Send (RTS) and Clear-To-Send (CTS) handshake is used to reserve the channel before data transmission.
Advantages of CSMA Protocols
-
Increased Efficiency: By ensuring only one device communicates at a time, CSMA reduces collisions and improves network efficiency.
-
Simplicity: CSMA protocols are relatively simple to implement and don't require complex hardware or software.
-
Flexibility: These protocols can be used in various network environments, including both wired and wireless networks.
-
Cost-Effectiveness: CSMA doesn't require expensive hardware or software, making it an economical solution for network communication.
Disadvantages of CSMA Protocols
-
Limited Scalability: As the number of devices on the network increases, the efficiency of CSMA protocols can decrease due to more frequent collisions.
-
Delay: In busy networks, the requirement to sense the medium and wait for an available channel can result in increased latency.
-
Reliability Issues: CSMA can be affected by interference, noise, and other factors, potentially leading to unreliable communication.
-
Security Vulnerabilities: These protocols can be susceptible to jamming and denial-of-service attacks that disrupt network communication.
Comparison of CSMA Variants
| Protocol | Transmission Behavior | Collision Handling | Efficiency | Use Cases |
|---|---|---|---|---|
| Pure ALOHA | Sends frames immediately | No collision detection | Low | Low-traffic networks |
| Slotted ALOHA | Sends frames at specific time slots | No collision detection | Better than Pure ALOHA | Low-traffic networks |
| CSMA/CD | Monitors medium after sending, retransmits if necessary | Detects collisions by monitoring transmissions | High | Wired networks with moderate to high traffic |
| CSMA/CA | Monitors medium, uses strategies to avoid collisions | Avoids collisions through various mechanisms | High | Wireless networks with moderate to high traffic |
Conclusion
Carrier Sense Multiple Access (CSMA) protocols provide effective methods for managing shared communication channels in computer networks. CSMA/CD, with its collision detection capabilities, was crucial for early Ethernet networks, while CSMA/CA continues to be important in wireless networking environments.
Understanding these protocols helps network administrators design and maintain efficient networks, particularly in environments where multiple devices need to share limited communication resources. While modern switched networks have reduced the need for collision detection in wired environments, the principles of CSMA remain relevant in many networking scenarios, especially in wireless communications.
Test Your Knowledge
Take a quiz to reinforce what you've learned
Exam Preparation
Access short and long answer questions for written exams