Blocking vs Non-blocking Sockets
Understanding the differences between blocking and non-blocking socket operations and their use cases
Blocking vs Non-blocking Sockets
Socket operations can be performed in either blocking or non-blocking mode, each with its own advantages and challenges. Understanding these modes is crucial for designing efficient and responsive networked applications.
Blocking Sockets
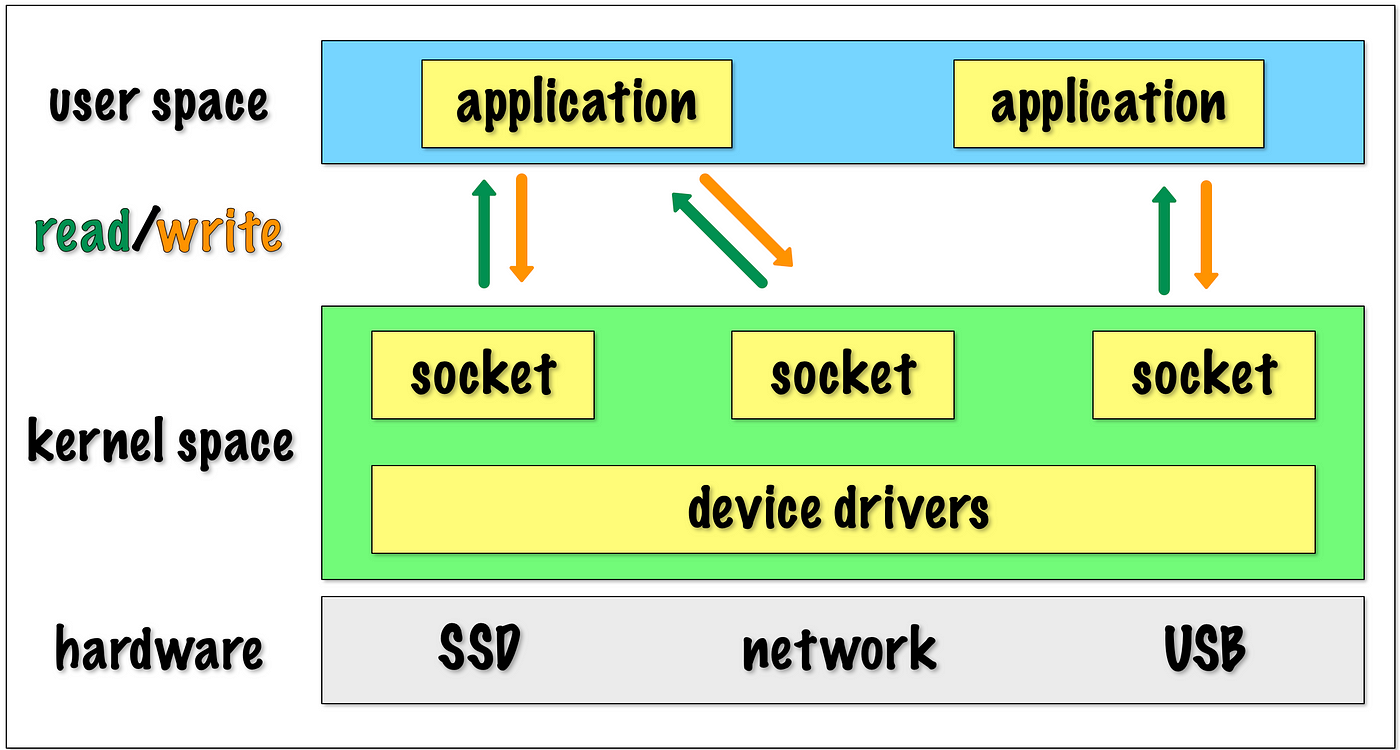
By default, socket operations in most systems are blocking. This means that when a program calls a socket function like accept(), connect(), send(), or recv(), the function does not return until the operation completes or an error occurs.

Characteristics of Blocking Sockets
- Simplicity: Blocking sockets are easier to program and reason about
- Sequential Execution: Operations happen in a predictable sequence
- Resource Efficiency: No need to constantly check for completion
- Thread Blocking: The calling thread is blocked until the operation completes
- Potential Deadlocks: Can lead to deadlocks if not carefully managed
Example of Blocking Socket Operations
In this example, the accept(), recv(), and send() calls are all blocking. The program will wait at each of these calls until the operation completes or an error occurs.
Non-blocking Sockets
Non-blocking sockets allow operations to return immediately, even if they cannot be completed right away. This enables a program to perform other tasks while waiting for socket operations to complete.
Characteristics of Non-blocking Sockets
- Immediate Return: Operations return immediately, regardless of completion
- Error Codes: Special error codes indicate when operations would block
- Polling Required: The application must check for completion
- Resource Intensive: Constant checking can consume CPU resources
- Complexity: More complex to program and reason about
- Responsiveness: Can improve application responsiveness
Setting a Socket to Non-blocking Mode
There are two common ways to set a socket to non-blocking mode:
Using fcntl()
Using ioctl()
Example of Non-blocking Socket Operations
In this example, the accept(), recv(), and send() calls are all non-blocking. When an operation would block, it returns immediately with an error code (EAGAIN or EWOULDBLOCK), allowing the program to perform other tasks and try again later.
Handling Non-blocking Operations
When using non-blocking sockets, you need to handle the special error codes that indicate an operation would block:
EAGAIN / EWOULDBLOCK
These error codes (which are typically the same value) indicate that the operation cannot be completed immediately and would block if the socket were in blocking mode.
EINPROGRESS
This error code is returned by connect() when the connection cannot be established immediately.
Timeouts with Blocking Sockets
Even with blocking sockets, you can set timeouts to prevent operations from blocking indefinitely:
Comparison: Blocking vs Non-blocking
| Aspect | Blocking | Non-blocking |
|---|---|---|
| Ease of Use | Simpler to program | More complex |
| Resource Usage | Efficient when idle | May consume CPU with polling |
| Responsiveness | Thread blocks until completion | Immediate return, can do other work |
| Error Handling | Straightforward | Must handle special error codes |
| Concurrency Model | Typically multi-threaded | Can be single-threaded with event loop |
| Use Cases | Simple applications, per-client threads | High-performance servers, GUI applications |
When to Use Each Mode
Use Blocking Sockets When:
- Simplicity is a priority: The application logic is straightforward
- Using multiple threads: Each connection has its own thread
- Operations are expected to complete quickly: Minimal waiting time
- Resource efficiency is important: No need for constant polling
Use Non-blocking Sockets When:
- Handling many connections: Need to manage many clients with few threads
- Responsiveness is critical: Cannot afford to block the application
- Implementing event-driven architecture: Using select(), poll(), or epoll()
- Building high-performance servers: Need to maximize throughput
- Developing GUI applications: Must keep the UI responsive
Best Practices
For Blocking Sockets:
- Set timeouts: Prevent indefinite blocking
- Use multiple threads: Handle multiple clients concurrently
- Implement proper error handling: Recover from network issues
- Consider connection pooling: Reuse connections when possible
For Non-blocking Sockets:
- Use event notification: Combine with select(), poll(), or epoll()
- Implement state machines: Track the state of each connection
- Avoid busy waiting: Don't continuously poll without sleeping
- Handle partial operations: Send and receive may complete partially
- Use buffer management: Efficiently handle data that cannot be sent immediately
Conclusion
Both blocking and non-blocking sockets have their place in network programming. Blocking sockets are simpler to use but can limit responsiveness, while non-blocking sockets offer greater flexibility at the cost of increased complexity.
For simple applications or those with dedicated threads per connection, blocking sockets are often sufficient. For high-performance servers handling many connections, non-blocking sockets combined with event notification mechanisms like select(), poll(), or epoll() provide better scalability.
In the next section, we'll explore these event notification mechanisms in detail and learn how to implement efficient multiplexing with non-blocking sockets.
Test Your Knowledge
Take a quiz to reinforce what you've learned
Exam Preparation
Access short and long answer questions for written exams